Featured Content
System-Level Cognitive Modeling with Ikaros
The goal of the Ikaros project is to develop an open infrastructure for system-level cognitive modelling. This includes system-level models of the brain, but also cognitive models that are not directly motivated by brain function. The article describes the background for the project and the
details of the Ikaros system.
What's New
A System-Level Brain Model for Enactive Haptic Perception in a Humanoid Robot
September 22, 2023
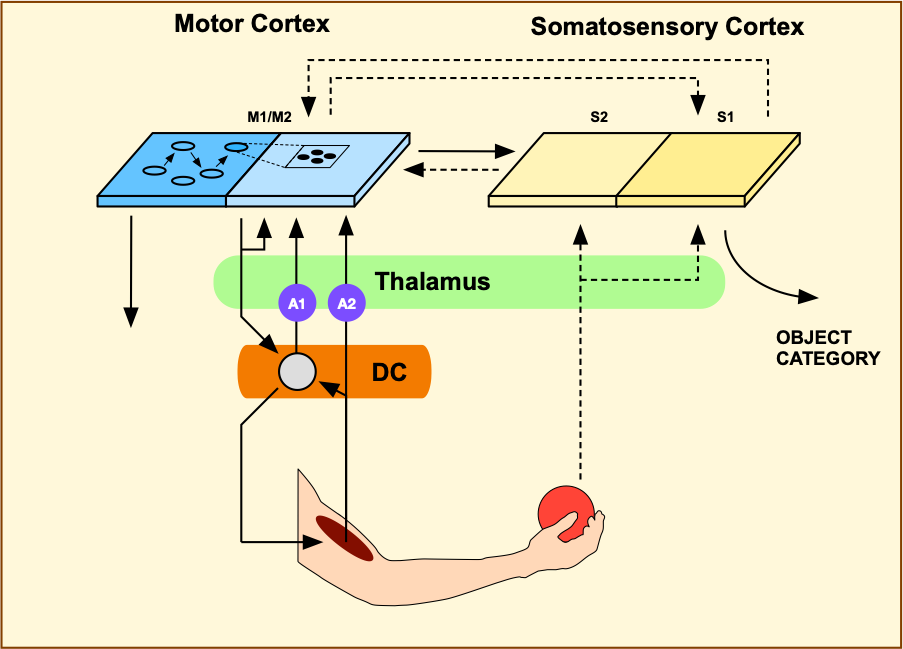
Ingvarsdóttir et al. presented a new model of haptic processing using the robot Epi at ICANN 2023. They describe howperception is not a passive process but the result of an interaction between an organism and the environment. This is especially clear in haptic perception that depends entirely on tactile exploration of an object. We investigate this idea in a system-level brain model of somatosensory and motor cortex and show how it can use signals from a humanoid robot to categorize different object. The model suggests a number of critical properties that the sensorimotor system must have to support this form of enactive perception. Furthermore, we show that motor feedback during controlled movements is sufficient for haptic object categorization.
Ingvarsdóttir, K. Ó., Johansson, B., Tjøstheim, T. A., & Balkenius, C. (2023, September). A System-Level Brain Model for Enactive Haptic Perception in a Humanoid Robot. In International Conference on Artificial Neural Networks (pp. 432-443). Cham: Springer Nature Switzerland.
The Missing Link Between Memory and Reinforcement Learning
December 10, 2020
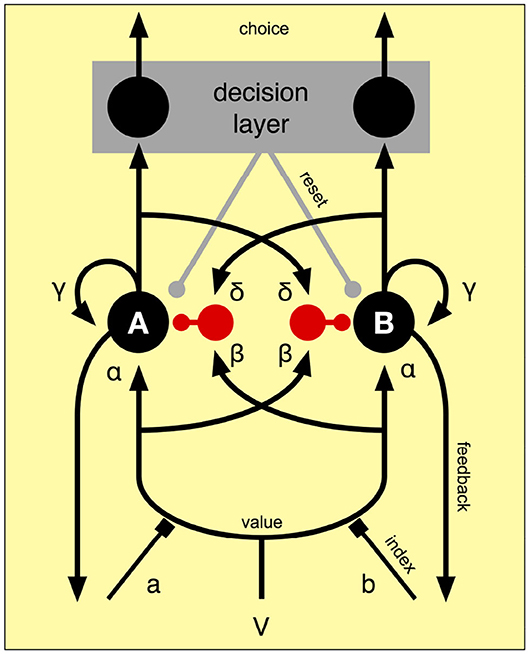
In a new publication, Balkenius, Tjøstheim, Johansson, Wallin and Gädenfors extend their earlier model of memory processing with a decision making mechanism. They describe how this memory mechanism can support decision making when the alternatives cannot be evaluated based on immediate sensory information alone. Instead we first imagine, and then evaluate a possible future that will result from choosing one of the alternatives. The model accumulates evidence over time, whether that information comes from the sequential attention to different sensory properties or from internal simulation of the consequences of making a particular choice. The authors show how the new model explains both simple immediate choices, choices that depend on multiple sensory factors and complicated selections between alternatives that require forward looking simulations based on episodic and semantic memory structures. In this framework, vicarious trial and error is explained as an internal simulation that accumulates evidence for a particular choice. It is argued that a system like this forms the “missing link” between more traditional ideas of semantic and episodic memory, and the associative nature of reinforcement learning.
Balkenius, C., Tjøstheim, T. A., Johansson, B., Wallin, A., & Gärdenfors, P. (2020). The Missing Link Between Memory and Reinforcement Learning. Frontiers in Psychology, 11, 3446.
A Computational Model of Trust-, Pupil-, and Motivation Dynamics
September 20, 2019
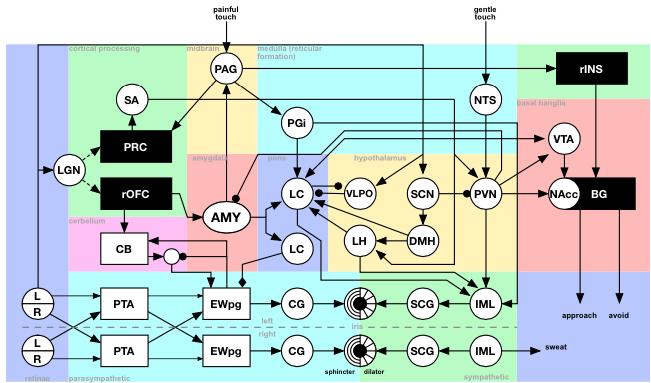
In a new publication, Tjøstheim, Johansson and Balkenius argue that machines may benefit from being able to explicitly build or withdraw trust with specific humans. The latter is relevant in situations where the integrity of an autonomous system is compromised, or if humans display untrustworthy behaviour towards the system. Examples of systems that could benefit might be delivery robots, maintenance robots, or autonomous taxis. This work contributes by presenting a biologically plausible model of unconditional trust dynamics, which simulates trust building based on familiarity, but which can be modulated by painful and gentle touch. The model displays interactive behaviour by being able to realistically control pupil dynamics, as well as determine approach and avoidance motivation.
Tjøstheim, T. A., Johansson, B., & Balkenius, C. (2019). A Computational Model of Trust-, Pupil-, and Motivation Dynamics. In HAI 2019. ACM.
Resources
-
Topics
-
Documentation
About
Logged Starts (v1, v2)
19133
Logged Starts (v3)